|
Hi! I am a second-year MSR student in the Robotics Institute at Carnegie Mellon University, advised by Prof. Jean Oh and Dr. Ji Zhang. Prior to this, I pursued my undergraduate studies at Shanghai Jiao Tong University (SJTU). I collaborated with Ph.D. Teng Hu at SJTU, under the supervision of Prof. Ran Yi, Prof. Yu-Kun Lai and Prof. Paul L. Rosin from Cardiff University. My research interests mainly lie in Embodied AI, Vision-Language Navigation and Object Navigation. I am actively seeking a PhD position for Fall 2026. Email / Resume / Google Scholar / Github |

|
|
[2026.01.31]: Our paper STRIVE: Structured Representation Integrating VLM Reasoning for Efficient Object Navigation is accepted by ICRA 2026! [2025.11.21]: Our new demos on Object Navigation is out now! [2025.05.10]: Our paper STRIVE: Structured Representation Integrating VLM Reasoning for Efficient Object Navigation is on arXiv! [2024.07.15]: Our paper AesStyler: Aesthetic Guided Universal Style Transfer is accepted by ACM MM 2024! [2023.12.12]: Our paper SAMVG: A Multi-stage Image Vectorization Model with the Segment-Anything Model is accepted by ICASSP 2024! [2023.11.09]: Our paper SAMVG: A Multi-stage Image Vectorization Model with the Segment-Anything Model is on arXiv! [2023.07.26]: Our paper Stroke-based Neural Painting and Stylization with Dynamically Predicted Painting Region is accepted by ACM MM 2023! [2023.07.14]: Our paper Phasic Content Fusing Diffusion Model with Directional Distribution Consistency for Few-Shot Model Adaption is accepted by ICCV 2023! |
|
|
|
|
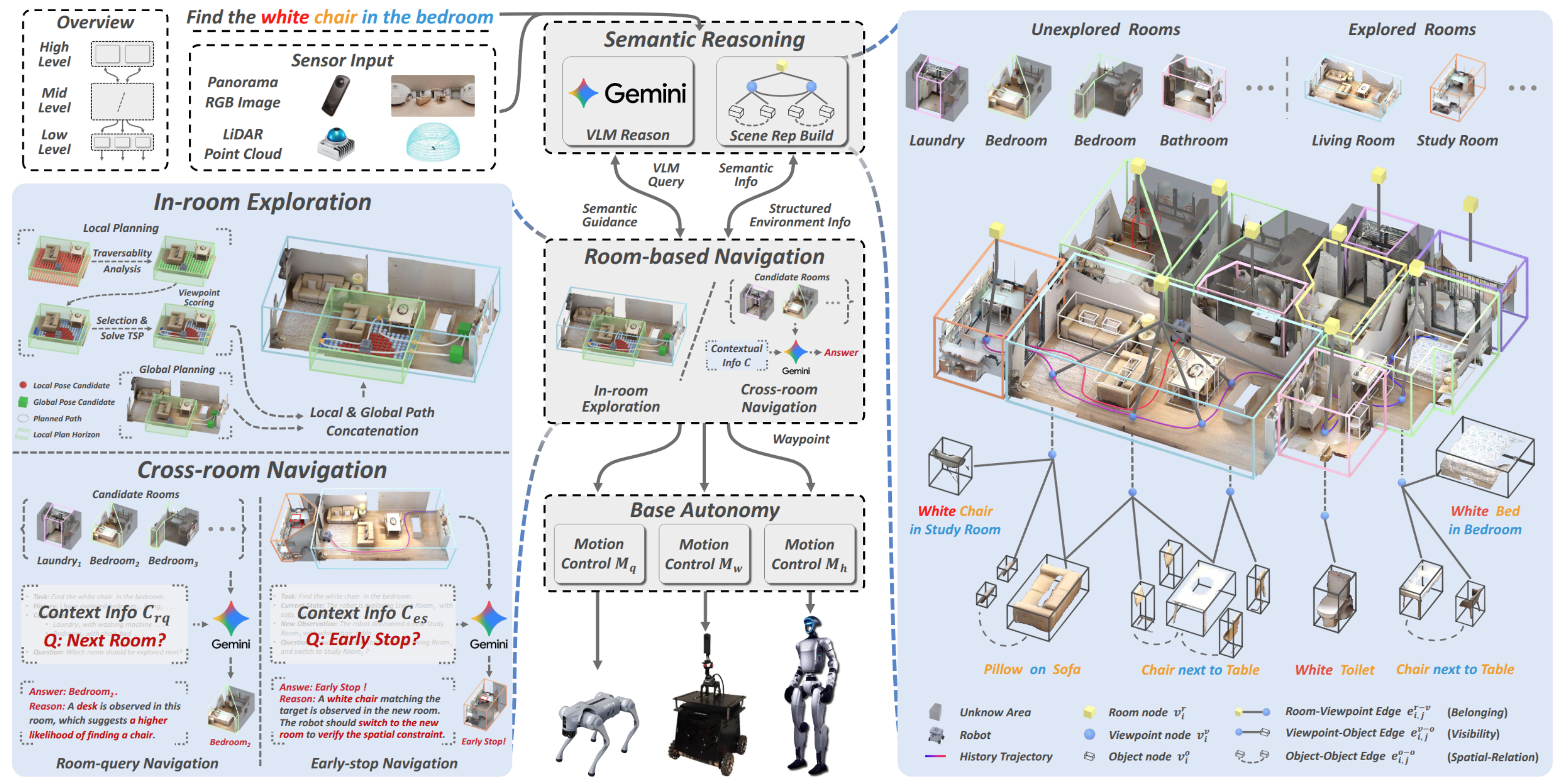
Haokun Zhu, Zongtai Li, Zihan Liu, Kevin Guo, Zhengzhi Lin, Yuxin Cai, Guofei Chen, Chen Lv Wenshan Wang Jean Oh Ji Zhang Under Review [website] [arXiv] We propose SysNav, a three-level object navigation system that decouples semantic reasoning, navigation planning, and motion control. We introduce a hierarchical navigation strategy that treats rooms as minimal decision-making units. Our system supports both standard object navigation and conditional object navigation. We evaluate SysNav through 190 real-world experiments across three robot embodiments, achieving 4-5x higher navigation efficiency than existing baselines. To our knowledge, this is the first system capable of reliably and efficiently performing building-scale object navigation in the real-world environments. |

|
Haokun Zhu*, Zongtai Li*, Zhixuan Liu, Wenshan Wang, Ji Zhang, Jonathan Francis, Jean Oh Accepted by ICRA 2026 RSS 2025 Workshop on Semantic Reasoning and Goal Understanding in Robotics [website] [arXiv] We propose a novel framework that constructs a multi-layer representation of the environment during navigation. Building on this representation, we propose a novel two-stage navigation policy, integrating high-level planning guided by VLM rea- soning with low-level VLM-assisted exploration to efficiently locate a goal object. We evaluated our approach on three simulated benchmarks (HM3D, RoboTHOR, and MP3D), and achieved state-of-the-art performance on both the success rate (↑ 7.1%) and navigation efficiency (↑ 12.5%). |

|
Zhixuan Liu, Haokun Zhu, Rui Chen, Jonathan Francis, Soonmin Hwang, Ji Zhang, Jean Oh Accepted by ICCV 2025 [website] [Paper] [Code] MOSAIC generates multi-view consistent images based on depth prior along robot navigation trajectories. It handles arbitrary viewpoint changes in multi-room environments and generalizes to open vocabulary contexts. |
|
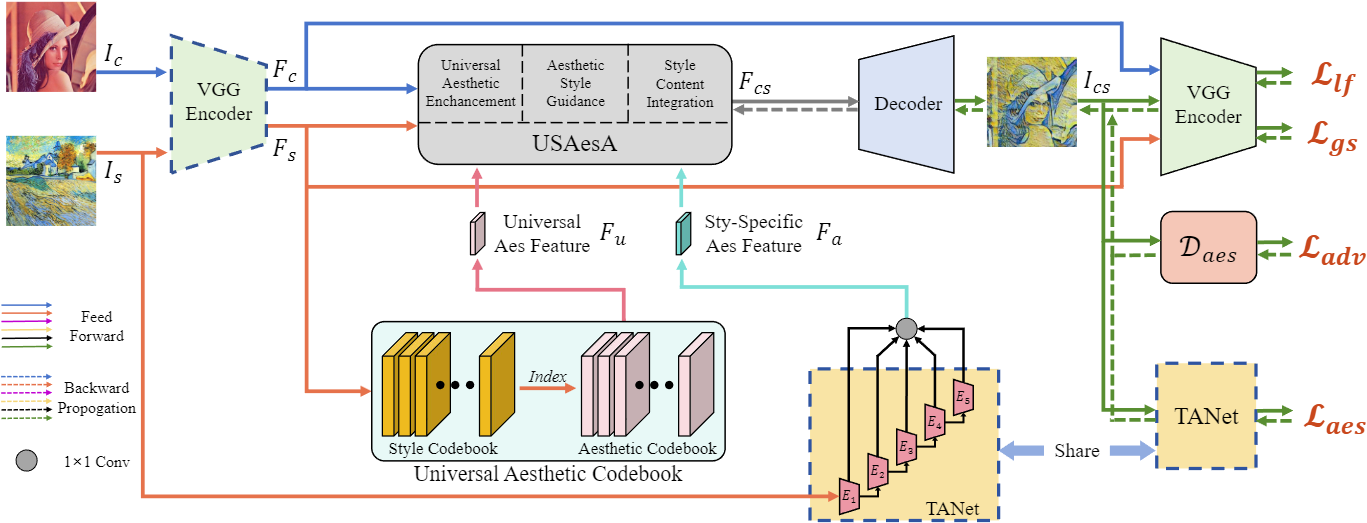
Ran Yi*,#, Haokun Zhu*, Teng Hu, Yu-Kun Lai, Paul L. Rosin Accepted by ACM MM 2024 [website] We propose AesStyler, a novel Aesthetic Guided Universal Style Transfer method, which utilizes pre-trained aesthetiic assessment model, a novel Universal Aesthetic Codebook and a novel Universal and Specific Aesthetic-Guided Attention (USAesA) module. Extensive experiments and user-studies have demonstrated that our approach generates aesthetically more harmonious and pleasing results than the state-of-the-art methods. |
|
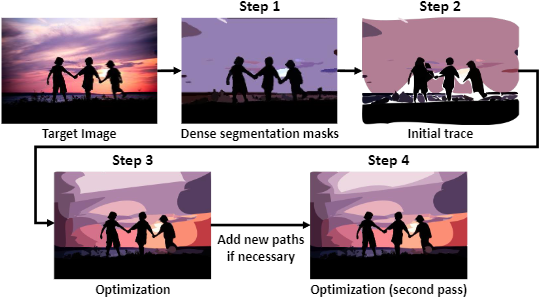
Haokun Zhu*, Juang Ian Chong*, Teng Hu, Ran Yi, Yu-Kun Lai, Paul L. Rosin Accepted by ICASSP 2024 [pdf] [arXiv] We propose SAMVG, a multi-stage model to vectorize raster images into SVG (Scalable Vector Graphics). Through a series of extensive experiments, we demonstrate that SAMVG can produce high quality SVGs in any domain while requiring less computation time and complexity compared to previous state-of-the-art methods. |
|
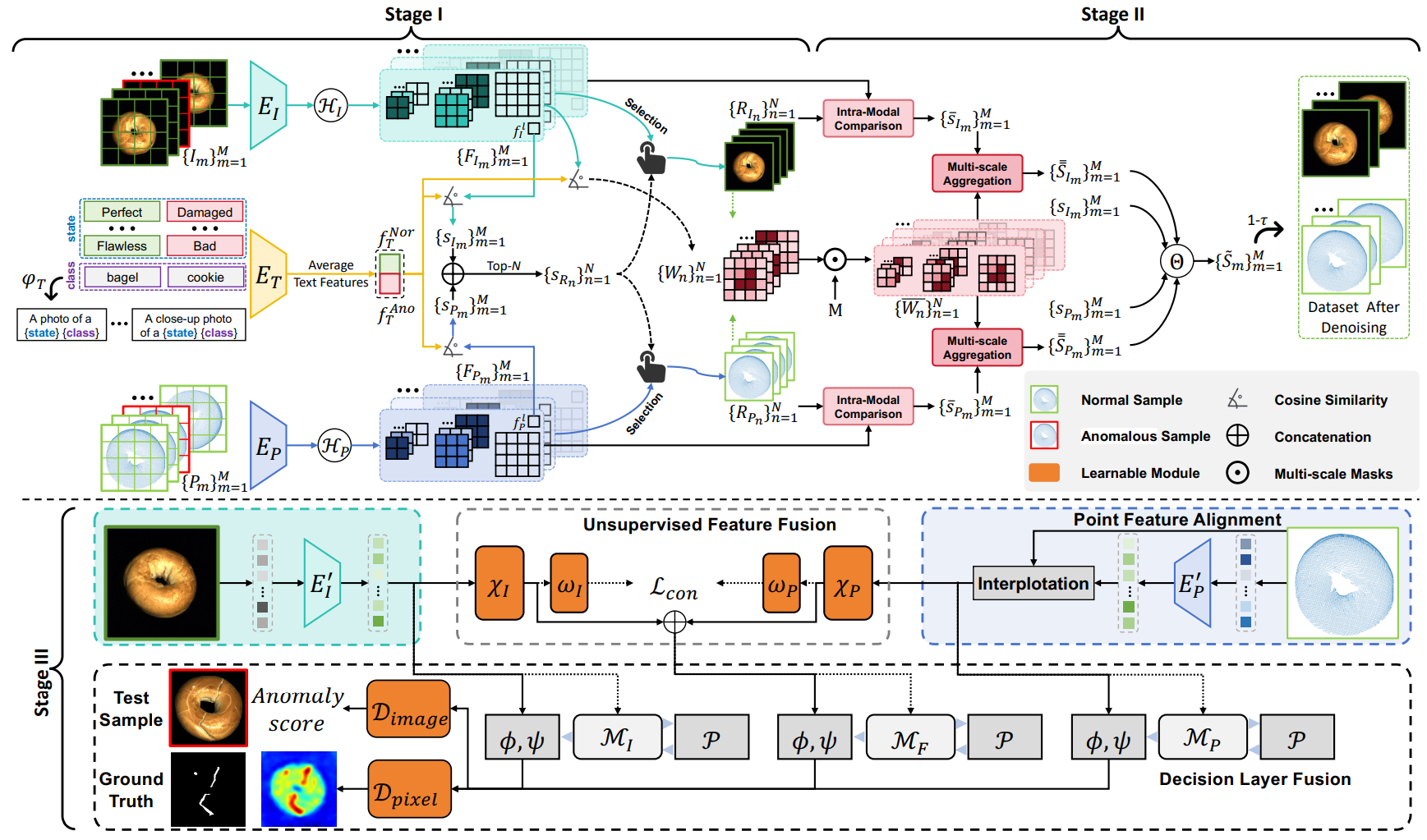
Chengjie Wang, Haokun Zhu, Jinlong Peng, Yue Wang, Ran Yi, Yunsheng Wu, Lizhuang Ma, Jiangning Zhang Accepted by TPAMI [pdf] [arXiv] We propose M3DM-NR, a novel noise-resistant framework to leverage the strong multi-modal(image and point cloud) discriminative capabilities of CLIP. Extensive experiments show that M3DM-NR outperforms state-of-the-art methods in 3D-RGB multi-modal noisy anomaly detection |
|
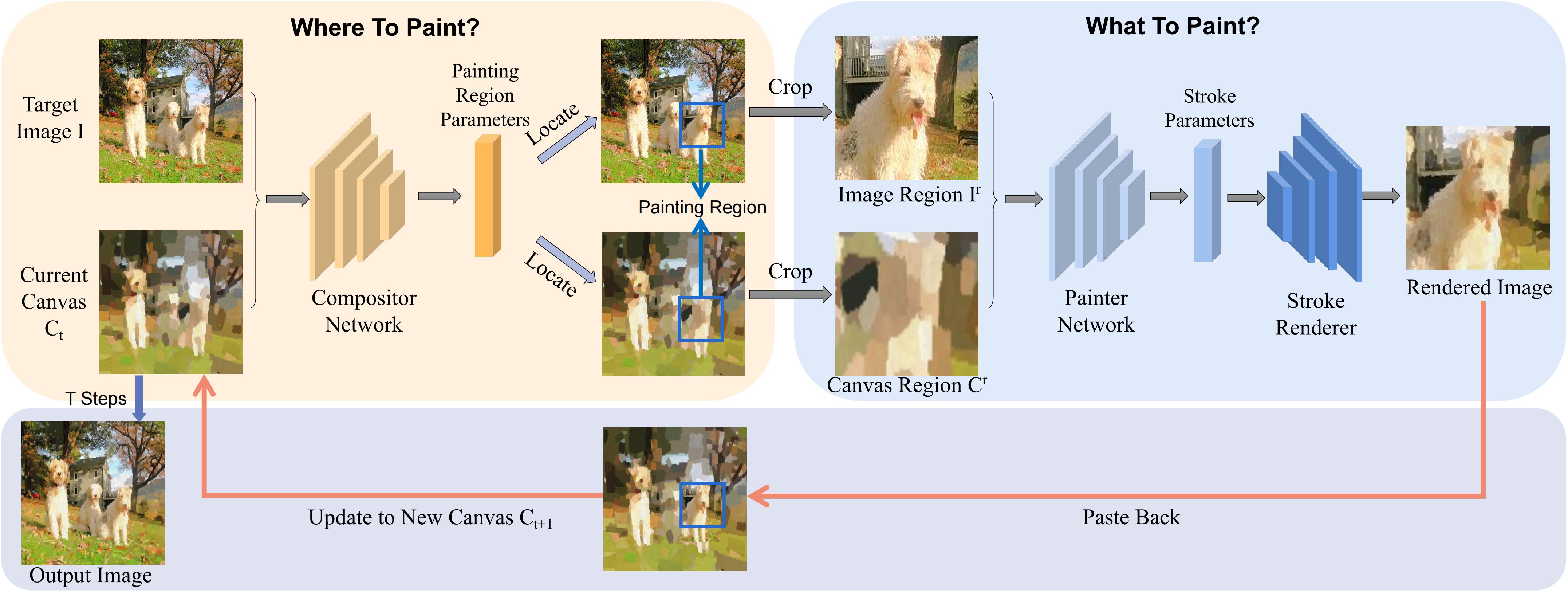
Teng Hu, Ran Yi, Haokun Zhu, Liang Liu, Jinlong Peng, Yabiao Wang, Chengjie Wang, Lizhuang Ma Accepted by ACM MM 2023 [pdf] [code] [arXiv] We propose Compositional Neural Painter, a novel stroke-based rendering framework which dynamically predicts the next painting region based on the current canvas, instead of dividing the image plane uniformly into painting regions. Extensive experiments show our model outperforms the existing models in stroke-based neural painting. |
|
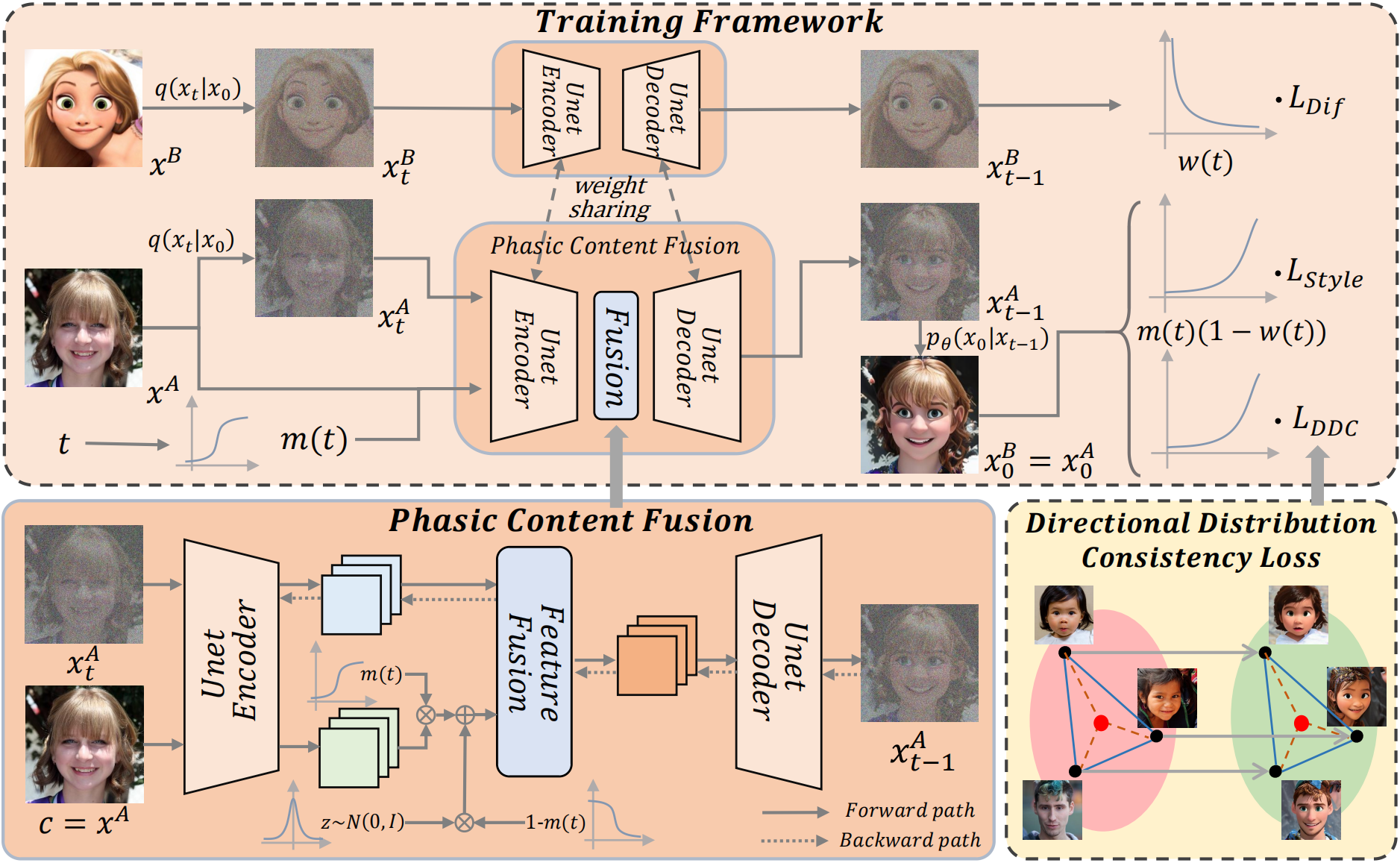
Teng Hu, Jiangning Zhang, Liang Liu, Ran Yi, Siqi Kou, Haokun Zhu, Xu Chen, Yabiao Wang, Chengjie Wang, Lizhuang Ma Accepted by ICCV 2023 [pdf] [supp] [code] [arXiv] We propose a novel phasic content fusing few-shot diffusion model with directional distribution consistency loss, which targets different learning objectives at distinct training stages of the diffusion model. Theoretical analysis, and experiments demonstrate the superiority of our approach in few-shot generative model adaption tasks. |